
2025-07-22 7041 0
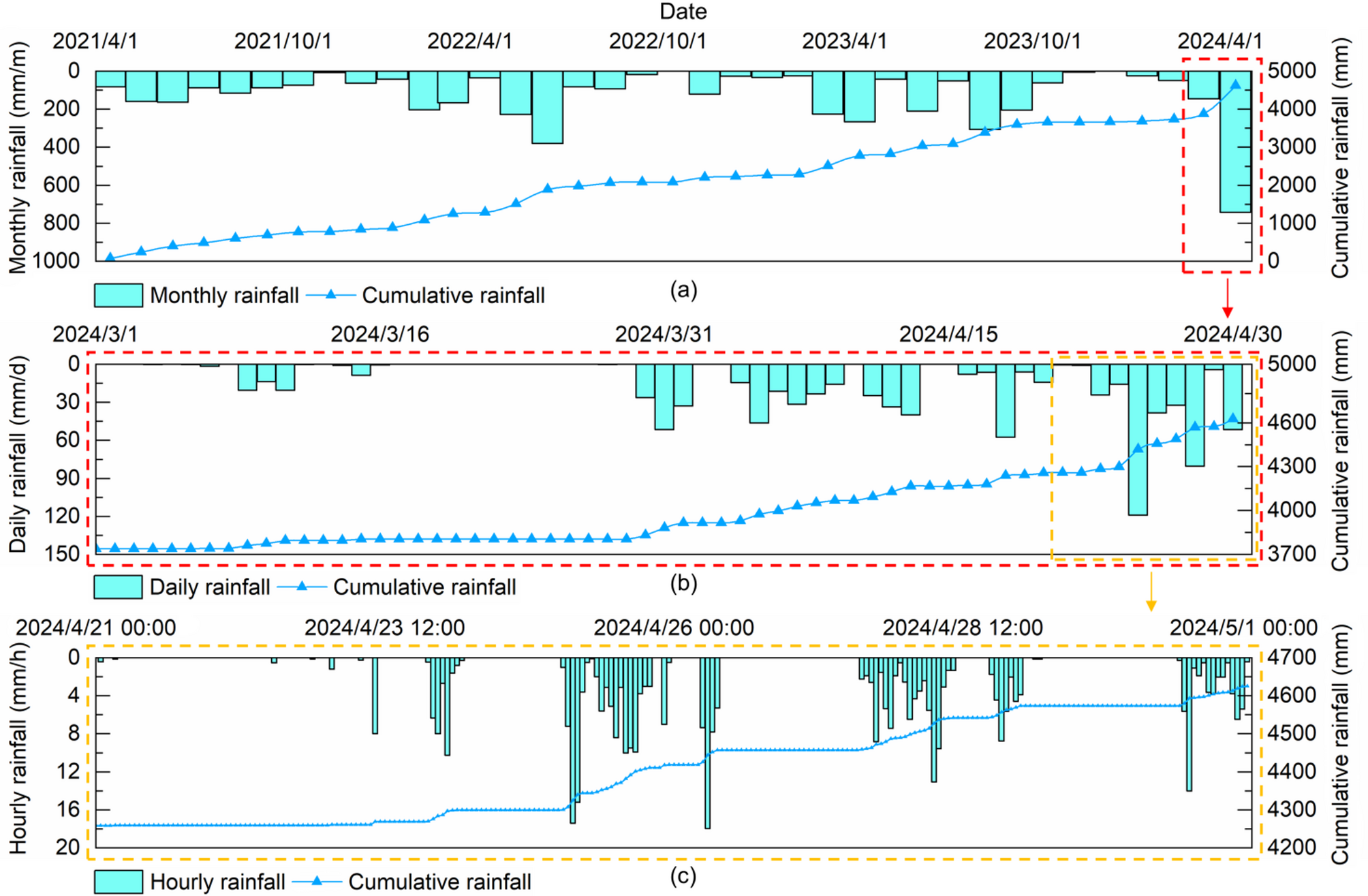
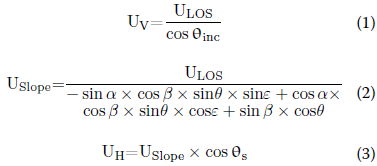
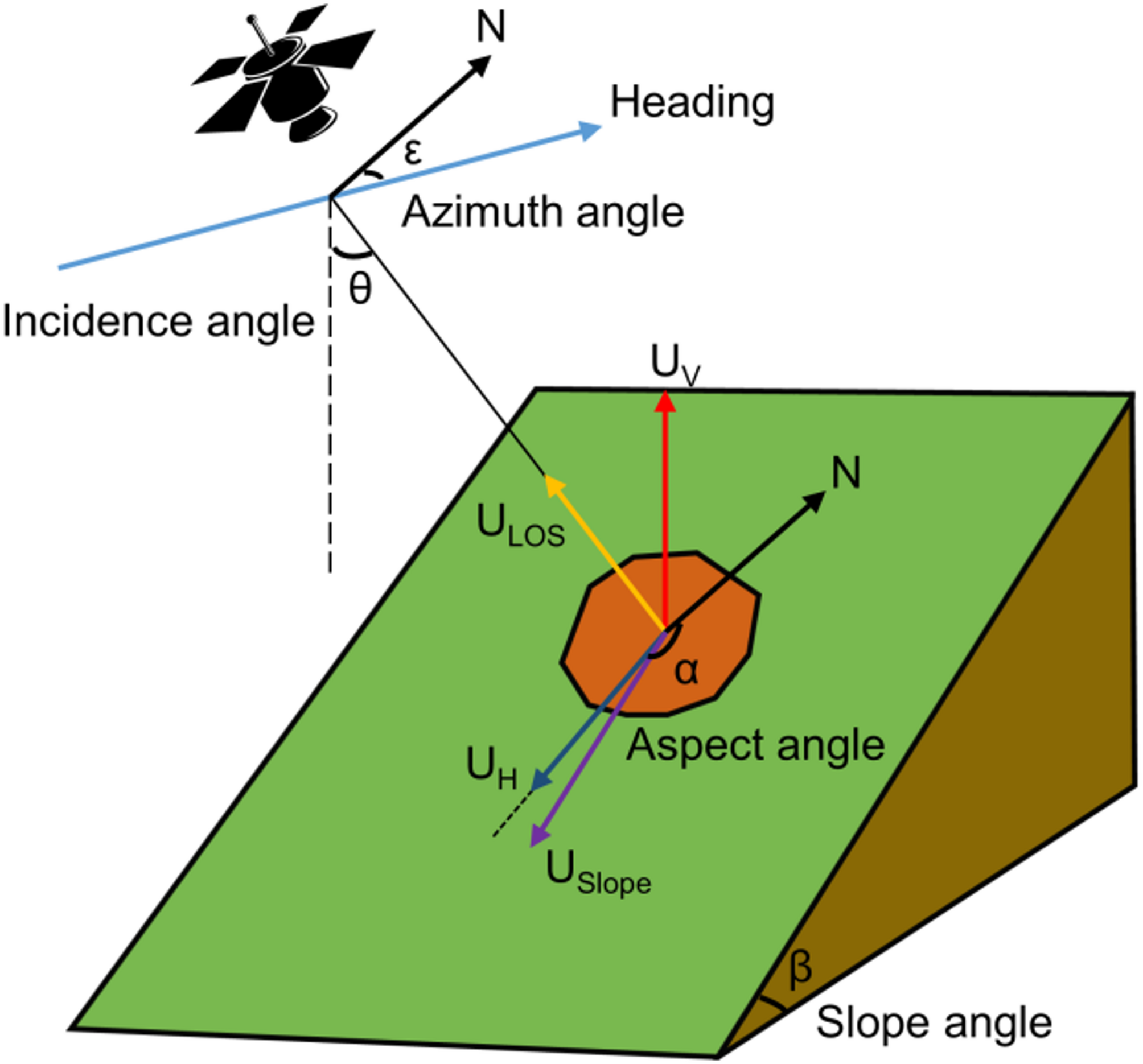
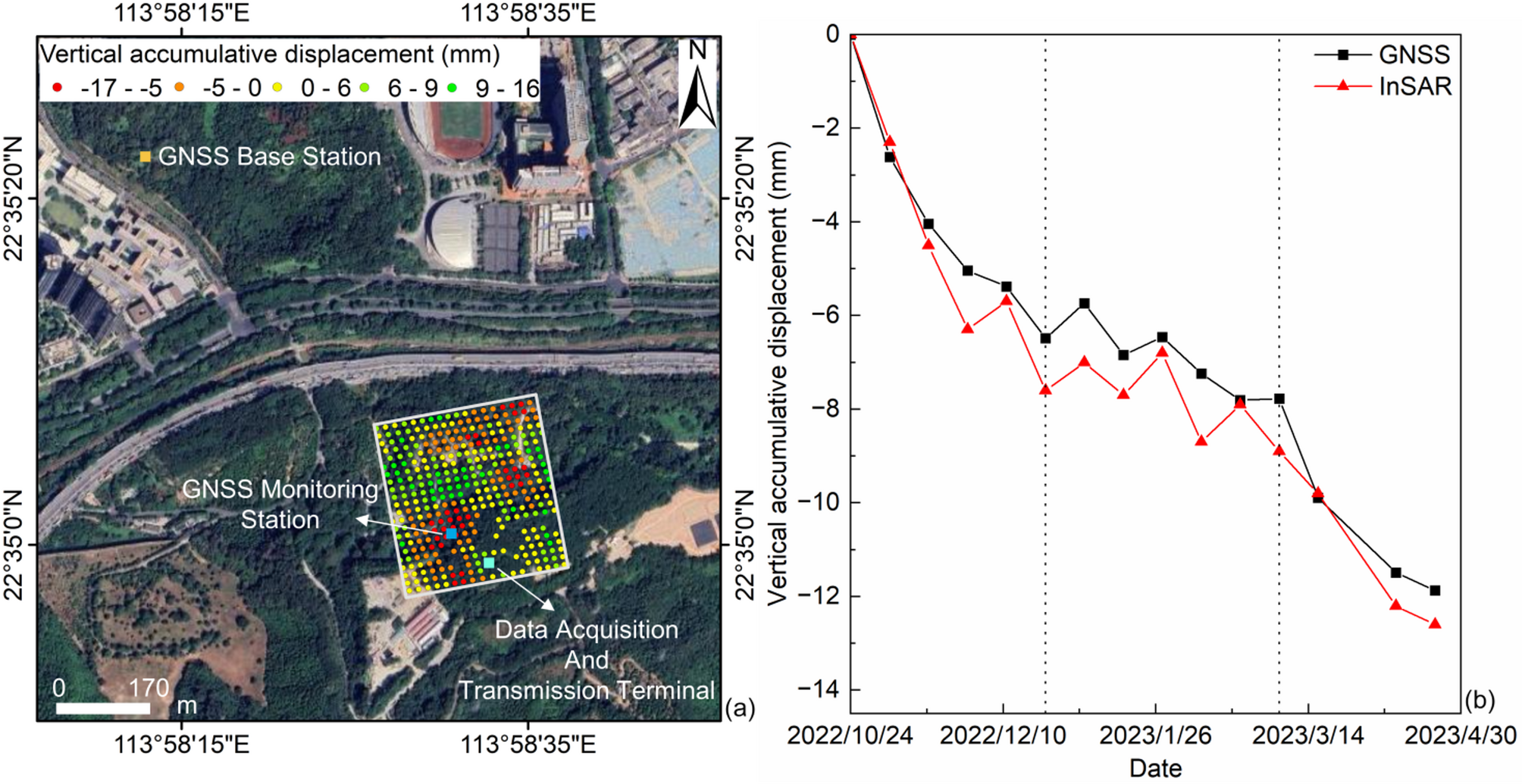
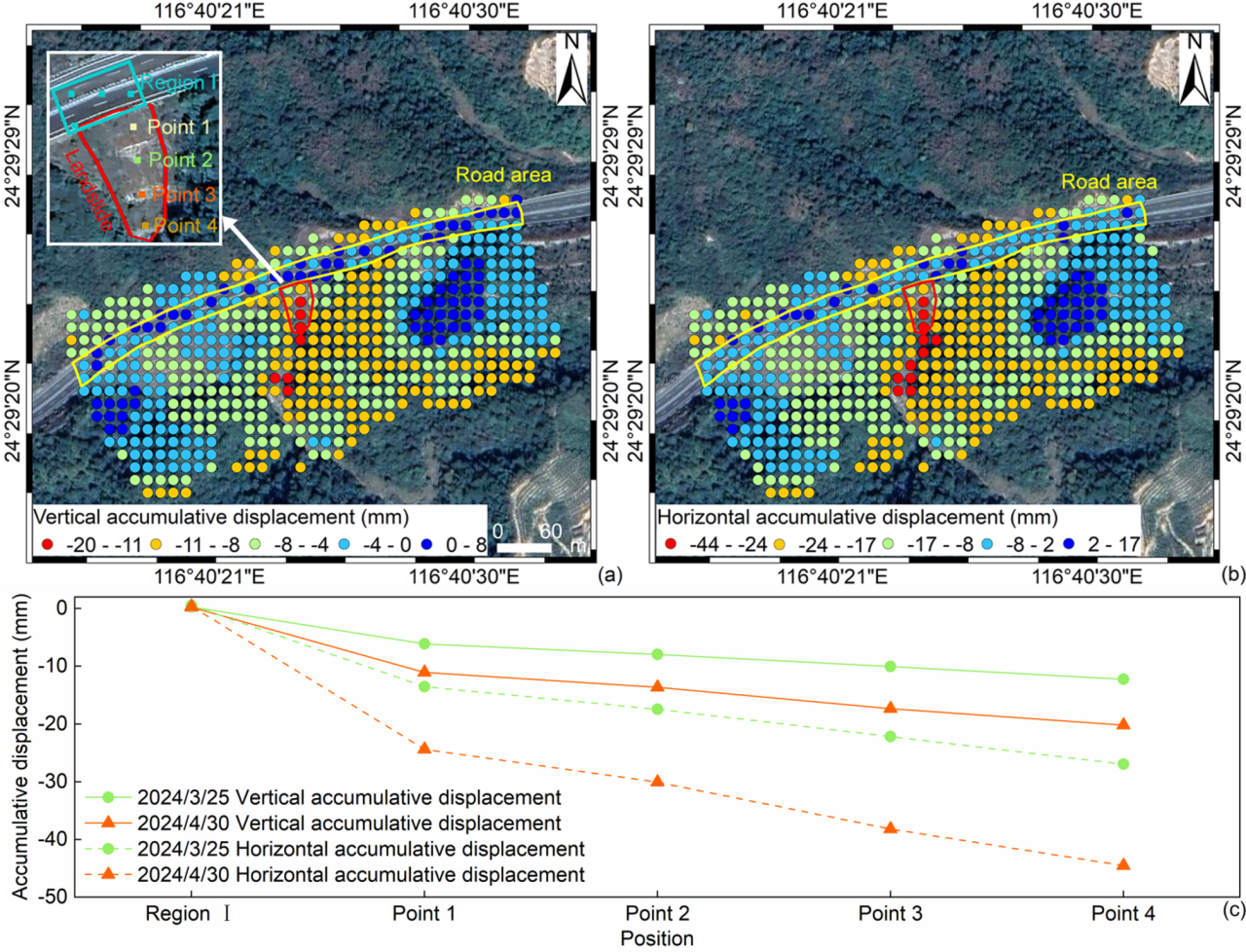
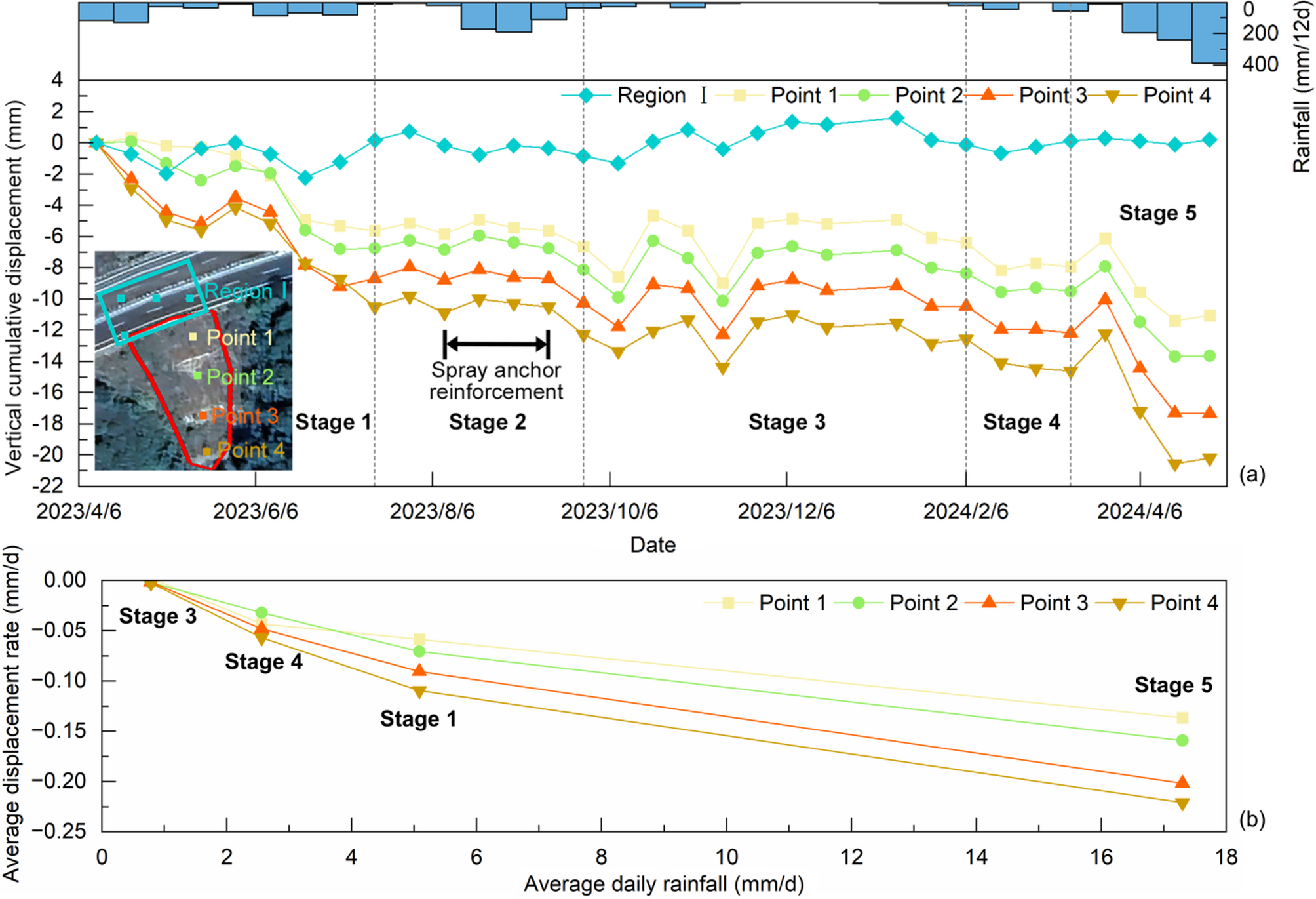
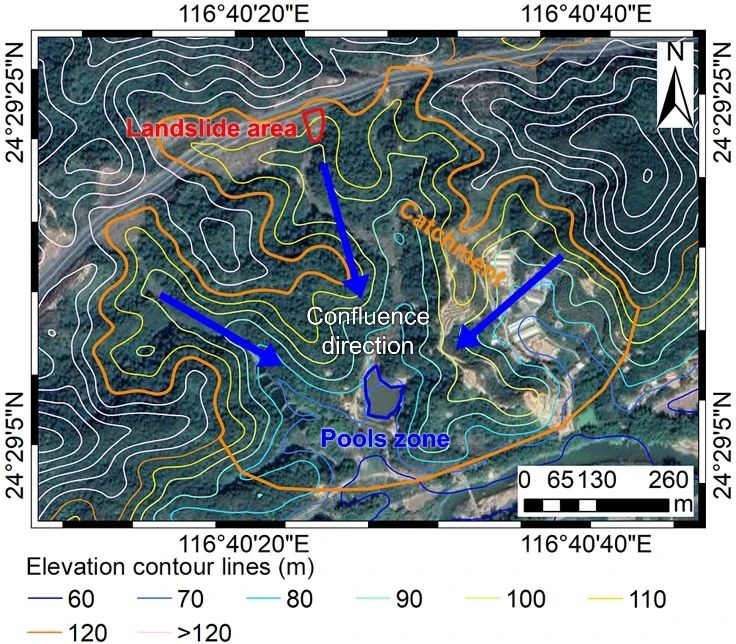
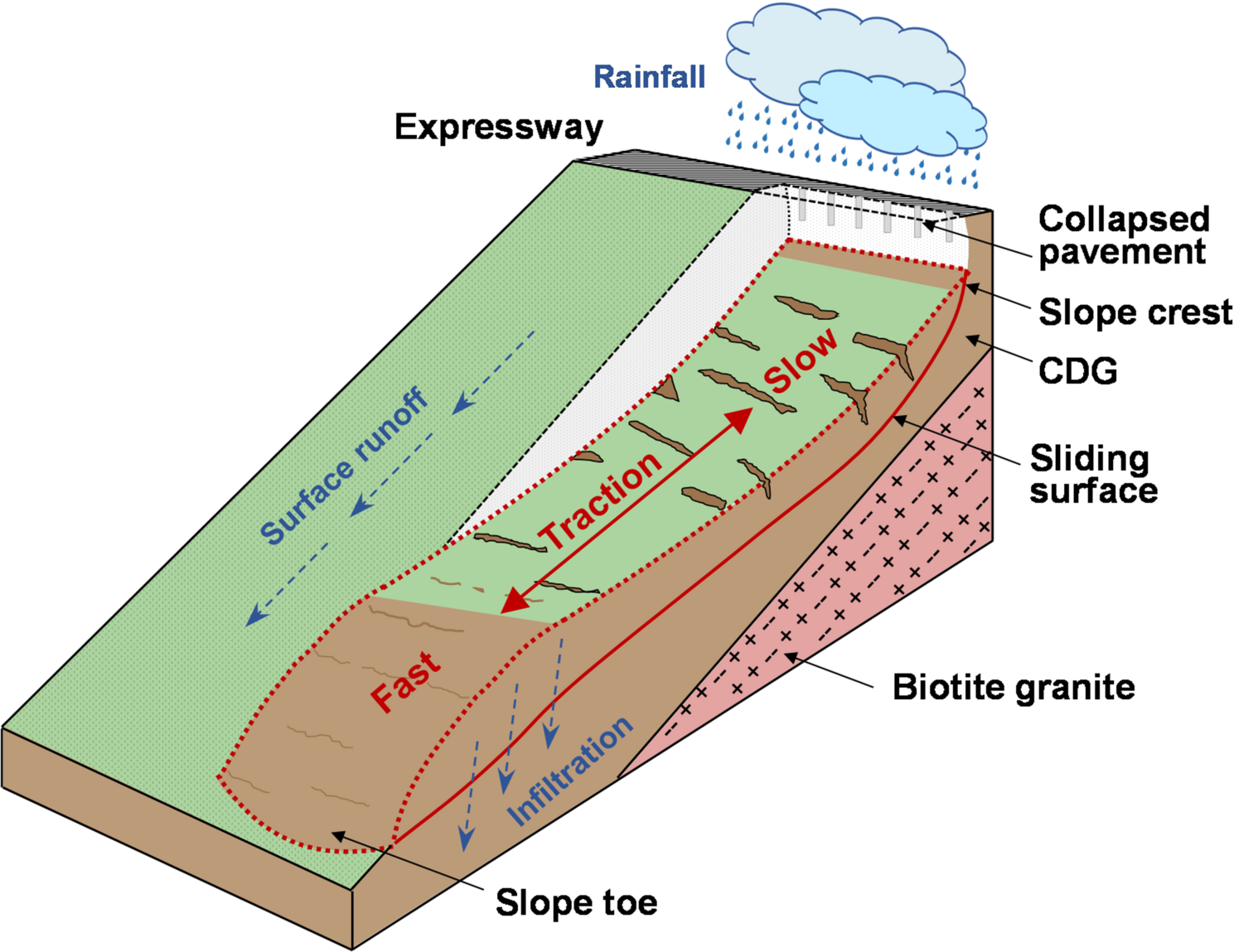
https://doi.org/10.1186/s40677-025-00331-x 摘要 2024年5月1日,中国广东省梅州至大埔高速公路一处路堤边坡发生滑坡,导致路面坍塌,造成23辆车坠落,48人死亡,30人受伤。本研究利用小基线集干涉合成孔径雷达(SBAS-InSAR)技术,结合Sentinel-1A雷达遥感影像,绘制了梅大高速边坡表面位移的时空分布图。通过结合卫星遥感影像、现场条件、降雨记录和数字高程模型(DEM),分析了路堤边坡的位移模式,揭示了滑坡的成因机制。研究结果表明,在事故发生前较长时间,坡顶与坡脚之间就已呈现缓慢的分离趋势,此次滑坡为牵引式滑坡。表面位移与季节性降雨显著相关,表明异常强降雨可能是本次滑坡主要诱因。本研究验证了综合遥感技术在监测缓慢变化牵引式滑坡方面的有效性,为未来滑坡灾害监测和预警提供了一条潜在途径。 梅大高速滑坡回顾 梅大高速是一条双向四车道高速公路,连接中国广东省梅州市梅江区与大埔县。梅大高速滑坡发生于2024年5月1日北京时间2时10分。根据图1(a-c)的现场照片估算,滑坡体积约为5215立方米,坡顶塌陷深度约7.7米,滑坡滑移距离超过100米。滑坡发生后,路堤与路面之间出现脱空(图1(c)),最终导致一段长17.9米、宽12.25米的路面坍塌,受影响路面面积达184.3平方米。该事件发生在五一假期出行高峰,致使多辆车辆冲入坍塌形成的深坑。截至5月2日15时30分,据报道共有23辆车坠落,造成48人死亡、30人受伤。 图1 梅大高速滑坡现场照片:(a)滑坡现场(2024/05/01/17:27:20);(b)滑坡冲击区域 (2024/05/01/17:01:45);(c)路面受损区域(照片来自中央电视台和新华社)。 本研究获取了滑坡区域过去三年的月降雨量、事发前两个月的日降雨量以及滑坡发生前十天的小时降雨量。图2(a)表明,滑坡区域降雨呈现季节性变化,每年雨季(4月至9月)会出现集中持续性暴雨,而冬季(10月至12月)和春季(1月至3月)降雨较少。2024年4月该区域经历了前所未有的强降雨(图2(b)),在4月16日至5月1日期间出现了持续16天的降雨,其中4月25日的日降雨量高达119毫米。4月月降雨量达到742毫米,是2023年4月降雨量(266毫米)的2.8倍。滑坡发生前十天小时降雨数据展现了四个明显的持续性强降雨时段,各时段峰值小时降雨量分别为17.4毫米、18毫米、13毫米和14毫米。这些观测数据表明,在4月尤其是临近滑坡发生前的时间段,滑坡区域经历了频率和强度空前的降雨事件,其降雨模式显著偏离历史常态。 图2 梅大高速滑坡降雨数据。(a)2021年4月至2024年4月的月降雨量和累积降雨量;(b)2024年3月1日至2024年4月30日的日降雨量和累积降雨量;(c)2024年4月21日至4月30日的小时降雨量和累积降雨量。 方法与验证 本研究采用SBAS-InSAR技术,基于时序雷达影像中的相位变化,分析了研究区域表面位移的时间演变特征,使用了时间跨度为2023年4月12日至2024年4月30日的32景Sentinel-1A升轨雷达影像。InSAR反演得到的表面位移代表的是沿雷达视线方向(Line-of-Sight, LOS)的位移,该位移是垂直方向、东西方向和南北方向三个分量的合成结果。基于表面平行流假说,本研究依据边坡-卫星的几何关系,将LOS位移分解为水平和垂直位移(如公式(1-3)所示)。 其中ULOS,USlope,UV,UH 代表了LOS向, 坡向, 垂直和水平向位移;θ, ε, α及β代表了雷达入射角、卫星方位角、坡向角及坡度。 图3 边坡-卫星几何关系示意图。 鉴于梅大高速滑坡区域缺乏可靠的现场监测数据,本研究通过与中国广东省深圳市塘朗山边坡的GNSS监测数据进行对比,验证了SBAS-InSAR技术的有效性。塘朗山边坡于2021年5月部署了一套基于GNSS的实时监测系统(图4(a))。图4(b)展示了位于GNSS监测站点位的InSAR反演结果与GNSS监测数据的对比情况。InSAR与GNSS获取的垂直向累积位移呈现出一致的变化趋势,二者在数值上的差异最大为1.5毫米,这主要是由于两种方法的测量精度差异以及失相关效应所致。综上所述,InSAR反演结果能够可靠地反映滑坡体的相对位移模式,其平均相对误差为0.11。 图4 塘朗山边坡SBAS-InSAR和GNSS结果的比较。(a)基于SBAS-InSAR的塘朗山边坡垂直方向累积位移;(b)GNSS和InSAR之间垂直向累积位移的比较。 边坡表面位移模式 利用SBAS-InSAR技术获得了梅大高速滑坡区域从2023年4月12日至2024年4月30日LOS方向上的累积位移。随后,基于公式(1-3),将LOS方向的累积位移投影分解为垂直位移和水平位移。其中,垂直位移以向上为正方向,水平位移则以朝向坡面方向为正,累积位移图如图5所示。以道路区域作为稳定参考基准,计算得出该区域的位移误差服从正态分布,误差范围为0.03 ± 1.64毫米,表明反演结果具有较高的置信度。 如图5(a)所示,垂直累积位移图清晰地显示出滑坡区域存在明显的向下累积位移。滑坡区附近的区域也存在相对较小的向下累积位移(如橙色点所示),随着远离滑坡区域,向下累积位移逐渐减小(如绿色和浅蓝色点所示)。水平累积位移的分布模式与垂直累积位移一致。在量级上,水平位移通常大于垂直位移,这归因于进行投影时边坡与卫星之间的几何关系。与垂直位移图相比,水平位移图揭示出滑坡区与一个先前存在的高位移区之间存在一个相互连通的位移带(图5(b))。滑坡区下方存在连续位移带表明,在破坏发生前该区域已存在显著的水平位移。滑坡发生后,滑动体的冲击可能触发了该区域的移动,从而形成了一个S形的冲击区域(见图3)。 为了更清晰地展示空间特征,图5(c)进一步对比了区域I以及滑坡体内四个点在2024年3月25日和4月30日的累积位移。可以明显观察到,点位越靠近坡脚,其累积位移越大,这表明坡顶和坡脚之间存在一种“分离趋势”。对比两个日期的结果,在经历持续性暴雨后,这种分离趋势变得更加显著,表明坡脚处的位移速率加快。随着降雨的持续,可以推断坡脚处的累积位移和位移速率持续增加,分离趋势愈发明显,滑动面逐渐从坡脚向坡顶发展,最终触发了滑坡。 图5 累积位移空间分布。(a)2023年4月12日至2024年4月30日计算区域垂直累积位移云图;(b)2023年4月12日至2024年4月30日计算区域水平累计位移云图;(c)2024年3月25日和2024年4月30日区域I和滑坡区域内各点的累计位移。 为进一步揭示滑坡运动的时间特征,本研究进一步分析了区域I及滑坡体内四个点的垂直累积位移时间序列,并与降雨数据进行了对比,如图6所示。滑坡区域的降雨数据覆盖时间为2023年4月1日至2024年4月30日,每个数据点代表该时间段内12天的累计降雨量。区域I及四个点的累积位移可划分为五个阶段:(1)阶段1(2023年4月12日至7月17日):此期间,滑坡区内四个点的累积位移均呈增加趋势,最大位移达10毫米,这可能是受到两轮降雨的影响。(2)阶段2(2023年7月17日至9月27日):降雨数据显示,8月至9月间存在一段强降雨期。然而,由于此期间在边坡实施了喷锚支护,时序位移并未呈现显著的下降趋势。(3)阶段3(2023年9月27日至2024年2月6日):由于此期间降雨稀少,滑坡区内各点未显示出显著的运动趋势。(4)阶段4(2024年2月6日至3月13日):与前一阶段相比,降雨量略有增加,滑坡体内各点的累积位移呈现出小幅度的下降趋势。(5)阶段5(2024年3月13日至滑坡发生前):此期间降雨量逐渐增大,滑坡区内各点显示出更明显的下降趋势,坡顶与坡脚之间出现显著的分离趋势。在滑坡发生前,位于坡脚附近的点4最大位移达到21毫米,而位于坡顶附近的点1累积位移为11毫米,这清晰地表明了坡脚与坡顶之间的分离。此时路面位移几乎为0毫米,表明路面存在与高速公路路堤边坡分离的倾向。 图6(a) 清晰地展示了滑坡体内四个点的位移模式与降雨强度之间存在正相关关系。计算了图6(a)中四个阶段的平均位移速率和平均降雨量,并在图6(b)中展示了二者的相关性。结果表明,降雨强度的增加系统地提高了滑坡体的位移速率,这种现象在靠近坡脚的区域尤为显著。例如,在关键的阶段5,平均日降雨量达到17毫米/天。在此期间,靠近坡脚的点4平均位移速率为-0.22毫米/天,而靠近坡顶的点1的速率较低,为-0.13毫米/天。这些点位之间位移速率的显著差异,导致了边坡发生渐进式分离。 图6 滑坡体内部和上方区域时序累积位移及其与降雨的相关性。(a)区域Ⅰ和点1-4的时序位移;(b)点1-4的平均位移速率与平均日降雨量之间的相关性。 滑坡机制分析 前文分析表明,滑坡区域表面位移的时间变化与季节性降雨密切相关,降雨强度与滑坡位移速率呈正相关,推断降雨是此次滑坡的主要驱动因素。结合DEM和谷歌地球光学影像,在滑坡区域下方70米高程处存在一个汇水区(图7)。该汇水区具有一个向西、北和东三向发育的集水盆地,其范围自底部向上逐渐扩大。滑坡区位于该集水盆地内,坡度约为15°,这意味着滑坡区位于该汇水盆地的集水路径上,表明在降雨条件下,雨水会持续入渗路堤边坡,并沿坡面向汇水区汇聚。由于该区域覆盖的强风化或全风化花岗岩遇水易软化且渗透性强,这种季节性的地表径流和内部渗流很可能导致坡脚处土体颗粒流失,增加了滑坡发生的可能性。此外,随着降雨强度增大,在地形汇聚效应作用下,更多的水流经坡面或入渗土体,导致土体强度下降,从而使土体能够以更快的速度滑动,边坡失稳的可能性进一步增加。本轮远超历史水平的强降雨极大地加剧了这一效应,最终触发了此次滑坡。 图7 研究区域等高线 此外,根据前述位移空间分布特征,坡脚与坡顶之间显著的分离趋势表明梅大高速滑坡属于牵引式滑坡模式。根据前人研究,牵引式滑坡模式的形成是由于外部因素导致坡脚支撑力丧失,进而使整个边坡在重力作用下沿滑动面逐渐下滑。如图8所示,牵引式滑坡具有三个主要特征:(1)牵引式滑坡的初始启动点通常位于坡脚。(2)失稳过程始于滑坡坡脚,并逐渐向上扩展至坡顶。当失稳到达坡顶时,坡顶形成张拉裂缝。(3)牵引式滑坡通常表现为一个缓慢渐进的破坏过程,而非突发性的大规模滑动。这种渐进式的破坏过程使得滑坡能够在较长时间内演化,并可能包含多个滑动阶段。从图5(c)和图6可以看出,坡脚处具有最大的累积位移和位移速率,表明本次滑坡起始于坡脚,并逐渐向上发展,这与牵引式滑坡的特征高度吻合。 图8 牵引式滑坡示意图 结论 本研究以梅大高速滑坡事件为典型案例,运用SBAS-InSAR技术、Sentinel-1A雷达卫星数据、降雨数据、现场条件及DEM数据,分析了梅大高速边坡表面位移的时空演变趋势、位移与降雨的相关性、滑坡机理及其潜在触发因素,得出以下结论: (1)梅大高速滑坡区表面位移呈现出清晰的分离趋势。从2023年至2024年,坡顶与坡脚之间的位移差异逐渐扩大了10毫米。这种坡顶与坡脚之间缓慢发展的分离趋势在事故发生前早已存在,并最终导致了自下而上的牵引式破坏模式。 (2)梅大高速边坡的表面位移模式与季节性降雨呈现显著相关性。综合邻近区域的地形、水文和气象条件分析,推断异常强降雨是梅大高速滑坡的主要触发因素。 (3)本研究验证了InSAR技术对于监测具有长期分离位移趋势且与季节性降雨显著相关的牵引式滑坡的有效性,可成为其早期预警的有效手段。未来,应将遥感方法与低空无人机、视频监控或原位传感器监测相结合,构建精度更高、效率更优的多级监测网络。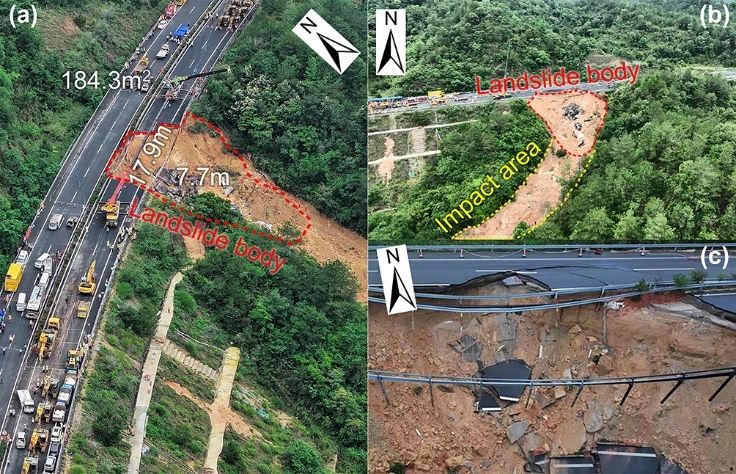
Hot News
 成功提示
成功提示
 错误提示
错误提示
 警告提示
警告提示





评论 (0)